| �̼����� | ���õȼ� | ������Ϣ | �������� |
 |
 |
ͼ��ֲ�����������������(��������) |  |
 |
|
ͼ��ֲ�����������������(��������) | |
ͼ��ֲ������������ǽ�10����ͼ������ģʽʶ����������һ���о��ȵ㡣�ܳ�ʱ������������һֱ��������������һ�����ܵر�ʶ��Χ�����������������������ƺ�����һ�δεı����ʧ������20���͵�70���ĩ80����������ڼ�����ķ����ʹ�����������ߣ���ȫ��Χ���������˹����ܵ��о��ȳ���������10��ʱ�䣬�����˶����˹���������ѧ���Ѿ����ձ���ɽ����20���͵�90���������Ԫ������о�Ҳ�����ﵽ�˿��ȵij̶ȣ������Dz���10���ʱ�䣬����������ʶ����ȥ�˹����ܲ��ܽ�������⣬��Ԫ����ͬ�����ܽ���������ǵ����.ŵ���������ļ�����������ص�ȱ�ݣ���������������ܺ�˼ά����ʵ����̫���ӡ������û���ģ�������Լ���������һ��������⣬Ҫ��Ȼ��������������Ҫͳ�������ˣ�һ���棬��ʵ��������������ǿ�ң�������̫���������Ҫ�����������ܵ�ȥ����������һ���棬�����о��Ľ�չ���������ijٻ��������ߵı�Թ���Ǵ���˷���
21���ͳ���ͼ��ֲ������������о���������һ�ε�ȼ�����Ƕ������о������飬��Ȼ��û�������˹����ܡ���Ԫ����ij����������Ƶ������ܰ������£�������ȷʵʵ���ڵؽ�������ǹ�ȥû�н����ʵ�����⡣����ͼ��ֲ����������������������ǡ������ԡ������֡�������ʶ��һ������ʱ��������������Զ��������ܶ���������ȷ�ı��ϣ��������ν�ij߶Ȳ����ԡ�ͬ������������巢����תʱ����������������ȷ�ر��������������ν����ת�����ԡ�����ô������û���Ҳ������һ���������������أ������ͼ��ֲ�����������Ҫ��������⡣
�ᵽͼ��ֲ����������������������Dz��ò��ἰ�ģ�һ����Lindeberg����һ����Lowe��������ֲ�������������������һ�����ӣ���ô��Lindeberg���Ǹ��ף�Lowe����ĸ�ס�Lindeberg�춨�˾ֲ��������������������ۻ����������˾ֲ��������������������ӣ���Lowe���������������Ϊһ���ܾ���ʵ�ֵķ�����
��ͼ��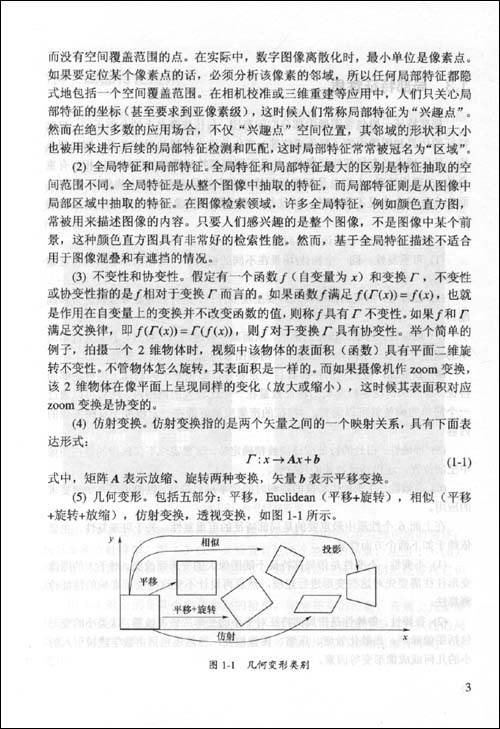
���������������Ӿ���֪һֱ�������о����ȵ㣬�����о�ʹ�û������������ܵ���֪��Χ����Ŀ�ѧ��Ȼ������ʹ��һ��ʮ�ּ����壬Ҫʹ�û���������ȥʶ��������һ��ʮ�ֲ������¡����У���Ϊ�ؼ���Ī����������ı�ʾ��������Ҳ����˵��������ȡʲô�����������ܹ���������һ��������һ���塣�ֲ������������ij��֣��ƺ�ʹ���ǿ����˽����һ�����ϣ��������Ϊһ��ʮ����Ч���ֶ��ѱ��ɹ���Ӧ�õ��㷺�������ϵͳ�У�����������ƥ�䡢�������ʶ������ʶ�𡢳������ࡢ���������Ρ��Ӿ������ھ�ȡ����⣬�ֲ�����������Ҳ�����ھ�ȷ�Ƶ������ľ���ƥ���ͼ���Զ�Ѱ���Ƶ��С�
1.1 �ֲ�������չ����
�й�ͼ��ֲ������о�����ʷ�����ݵ�20����70���ĩ��1977��MoravectI��������˽ǵ���������ʱ��ʹ�õ��ǡ���Ȥ�㡱������Moravecͨ���Ҷ�����غ���������һ�����غ����������ص������ԡ�����λ��ƽ̹��������أ�����Ȼ������Χ�ĵ㿴��������࣬�����ش��ڶ�����������ȱ仯��λ��ʱ������Χ���ز������ˣ��������Ҫ���Ľǵ㡣Moravec�ǵ����кܶ�����ԣ����������߱���ת�����ԣ����������еȡ�����һ��ֻ�ڽ��ֲܾ�������ʷ��ʱ��Żᱻ���ἰ����1988��HarrisI[2]����˽ǵ������㷨����Moravec�ǵ㲻ͬ��Harris����������������ȿ�ķ����ƶ��������˾��нṹ��Ϣ��2x2 Harris����������������������Ƚϴ������ֵʱ�����϶�Ϊ��һ���ǵ����������ڲ��������Ӻ;�������ֵ�����ж���Harris�ǵ�ȡ�Moravec�ǵ���и��ߵļ���ʺ��ظ��ʣ����Ҷ���ת�ͻҶȱ仯���в����ԡ���ĿǰΪֹ��Harris�ǵ���ijЩӦ������Ȼ��ʹ�á��ھֲ���������ʷ�ϣ��ر�ֵ��һ�����L,indebergt 3j��20����90���ϵͳ��������źŵij߶ȿռ����ۡ�Ϊ�˷���ͼ���и����ֲ������ij߶ȣ�ͼ����Ҫͨ��һϵ��ƽ��������������֤���˸�˹���dz߶ȿռ�Ψһ��ȷ���˲����飩�������͵õ���һϵ�е�ƽ��ͼ��ͼ��ij߶ȿռ䡣
����Ķ���