图像处理中消除相机透镜畸变和视角变换
一般的针孔相机模型如下:
三维坐标点经过透视投影变换,转换到一个图像平面坐标点。

而相机透镜还存在一定的畸变,包括横向畸变和切向畸变。
因此,针孔相机模型又被扩展为以下模型:
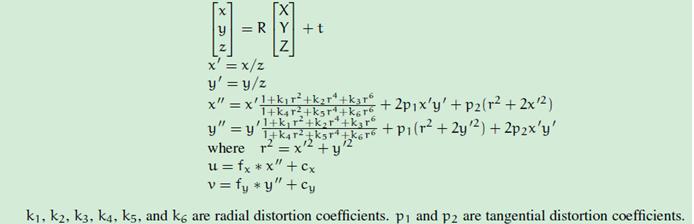
首先,世界坐标被转换为相机坐标,由X,Y,Z到x,y,z;
然后,归一化,z=1处,x,y的投影坐标x`,y`;
接下来,对投影坐标,进行畸变处理;
最后,由相机坐标转换到图像坐标。
在使用广角镜头或鱼眼相机时,原始图像存在畸变比较严重。
在图像识别的很多应用场景中,消除图像的畸变是图像预处理的首要问题。
通过相机标定,很容易拿到相机的内部参数,包括焦距、光心和畸变系数。
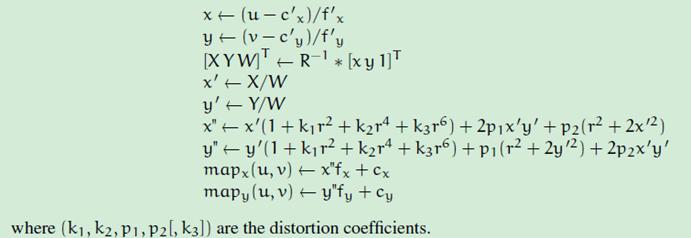
以上过程,就是透镜畸变前后图像坐标变换的公式。具体步骤如下:
1. 由图像坐标系反变换到相机坐标系中
2. 然后,校正反变换R-1,一般无校正变换的相机,默认为单位矩阵
3. 归一化,并进行相机透镜畸变处理
4. 由相机坐标转换到图像坐标。
由此,得到由针孔模型到透镜畸变畸变模型相互变换的对应关系u <--> mapx, v <--> mapy
initUndistortRectifyMap函数就是完成了以上工作。
opencv中,remap与undistortion都是消除畸变的函数,undistortion在设置了一些参数后调用了remap函数,二者的算法实质是一样的。由目标图像的坐标,找到对应的原始图像坐标,然后将其值复制到目标图像。大致思路是如此,由于图像大小和变换,需要插值或近似的方法,如最邻近法、线性插值等
图像视角变换
如图像由前向视角frontview转换为俯视角birdview。
一般来讲,相机向下倾斜时,相机前向视角frontview的视角范围比较大,而俯视birdview需要的视角比较小(涉及地面的视角部分)。

针孔模型下,在前向视角图像中,截取涉及地面的部分,并通过透视变换,转换为俯视视角。地面的一个矩形区域,在前向视图中会大致是一个三角形或梯形的形状,而在俯视图中,仍是一个矩形图像,且能保留线性、平行性特征。
如下,一个前向广角视图,转换为俯视图。
前向视图:

俯视图:

转换方法:
首先,通过标定获取相机的外部参数,世界坐标系中相机的位置Position和倾角(相对于x,y,z坐标轴的角度),即M=R|t。并假定地面的z坐标为z=0.
然后,获取俯视图内的三维地面坐标。z=0,地面区域的实际大小与俯视图的大小成一定比例,即俯视图中一个像素的位置(u`,v`),在地面坐标上,也有对应的位置(x`, y`, 0)。
然后,通过相机模型,将每个地面位置坐标(x`,y`, 0)转换为前向视图中的坐标(u, v)。
此时,前向视图像与俯视图像有一个对应关系(u,v) <--> (u`,v`)。
通过对应关系,每个俯视图的像素都在前向视图像中有对应的位置,两者的像素值相等(使用最邻近法或线性插值等)。俯视图前方的部分边缘模糊比较严重,这是在原图中采样范围小的原因。